估计点云中的曲面法线 |
您所在的位置:网站首页 › pca点云法线估计 法线方向确定 › 估计点云中的曲面法线 |
估计点云中的曲面法线
|
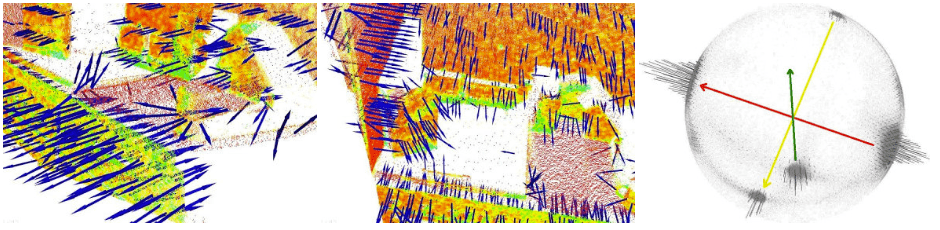
通常,由于没有表示法向量符号的数学方式,因此通过主成分分析(PCA)计算出的法线方向是模糊的,并且在整个点云数据集上的方向并不一致。下图显示了在较大数据集厨房一部分环境中的两部分上的效果。图的右侧是扩展高斯图像(Extended Gaussian Image, EGI),又称法向球,用来描述点云法线方向的基准。由于数据集是2.5D的,而且是从单一的角度获取的,因此在EGI中法线只会在球体的一半上出现。然而,由于方向不一致,它们分布在整个球面上。
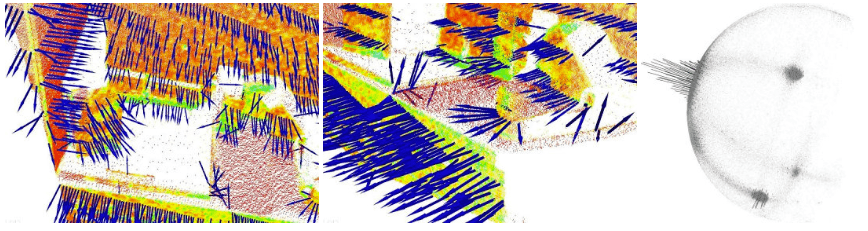
如果已知,那么可以很容易的解决这个问题。为了使所有法线始终朝向视点,它们需要满足这个等式 下图显示的结果是,来自上图的数据集中的所有法线都一致指向视点之后的结果。
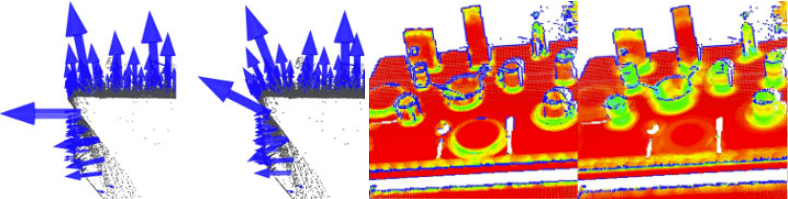
适当比例的选择 如前所述,估计点处的表面法线需要周围点的信息 (也称为k邻域)。 最近邻问题的特性面临适当尺度因子的问题。对于给定的点云数据集,需要选择合适的最近的k个点数量(pcl::Feature::setKSearch),或者适当的邻域半径r(pcl::Feature::setRadiusSearch)。 如果用户没有确定相应阈值,在点特征表示的自动估计中会构成一个限制因素。为了更好地说明这个问题,下图展示了选择较小尺度(小r或k)与大尺度(大r或k)。图左半部分展示了一个合理的精心选择的比例因子,两个平面的估计表面法线近似垂直,整个图中小的边缘全部显示出。如果缩放系数太大(图右半部分),即从相邻范围覆盖更大的点集,估计特征点表达失真,得到两个平面边缘上的旋转曲面法线,和模糊的边缘与细节。
目前必须根据应用程序所需的详细程度来选择确定点邻域的范围。简单地说,如果杯子把手和圆柱形部分之间的边缘曲率很重要,那么比例因子需要足够小才能捕捉到这些细节,否则就需要足够大。 使用OpenMP加速法线估计 对于速度敏感的用户,PCL提供了一个额外的表面法线估计实现,它使用使用OpenMP的多核/多线程范例来加速计算。类名为:pcl::NormalEstimationOMP ,与pcl::NormalEstimation类完全兼容。在8内核的系统上,可以获得6-8倍的计算速度。 从0到1学习SLAM,戳↓ 学习SLAM的小伙伴,那些年有没有哭晕在厕所? 返回搜狐,查看更多 |
【本文地址】